Pinto Robot Squirrel
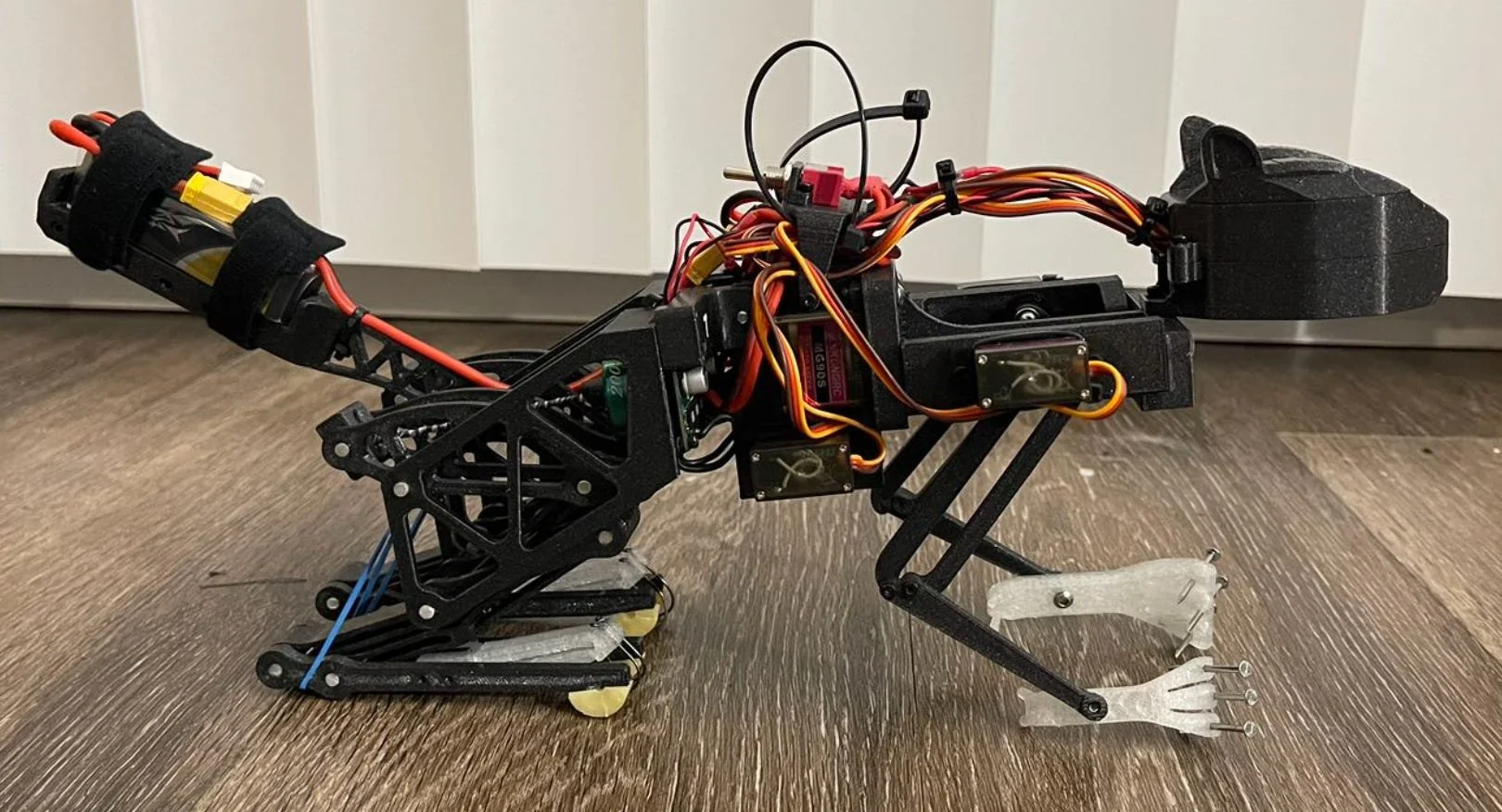
“Pinto” is an undergraduate research project in Novel Mobile Robots Lab that builds a robotic squirrel to mimic the agile motions of a squirrel. It is created to commemorate the beloved UIUC campus squirrel “Pinto Bean”. This robot has 7 degrees of freedom, with 2 in the back legs driven by twisted string actuators and 5 in the front legs actuated by Dynamixel XL330 servos. It has custom made grippers out of fish hook to perch onto trees.
My main contribution is divided into mechanical design and experiment conducted on this robot. In Pinto v1, I designed the 2 versions of the back leg, in which prototype 1 proved high friction loss in a bevel-gear transmission, and prototype 2 proved the feasibility of a direct-drive twisted string mechanism due to the its efficiency and unique mechanical advantage. In Pinto v2, I designed the 5-DOF from arm, the fishhook gripper used for perching onto the tree, the tail mechanism used for aesthetics purpose and recovery. For the experiment part, I did most of the tuning for the jumping behaviors and conducted most of the experiments that demonstrated the behaviors of the robot which contributed to a conference paper submitted to IEEE ICRA 2025. Moreover, we had a presence at Engineering Open House 2024, and we were awarded 1st prize for the Distinguished Tech or Robotics Exhibit award.