SATYRR Hardware
This is a collection of hardware developed to assist the research conducted on a wheeled humanoid robot SATYRR at RoboDesign Lab.
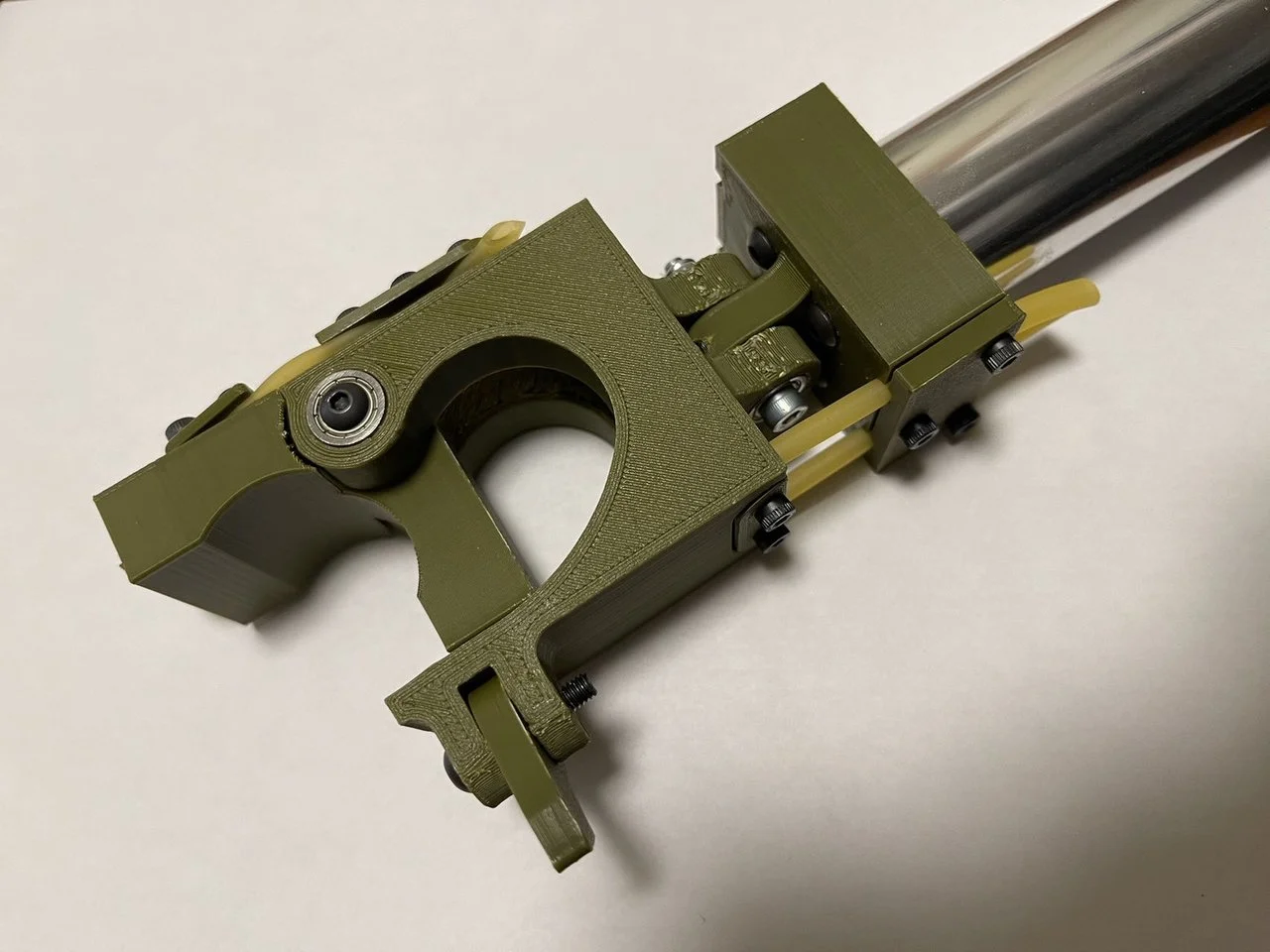
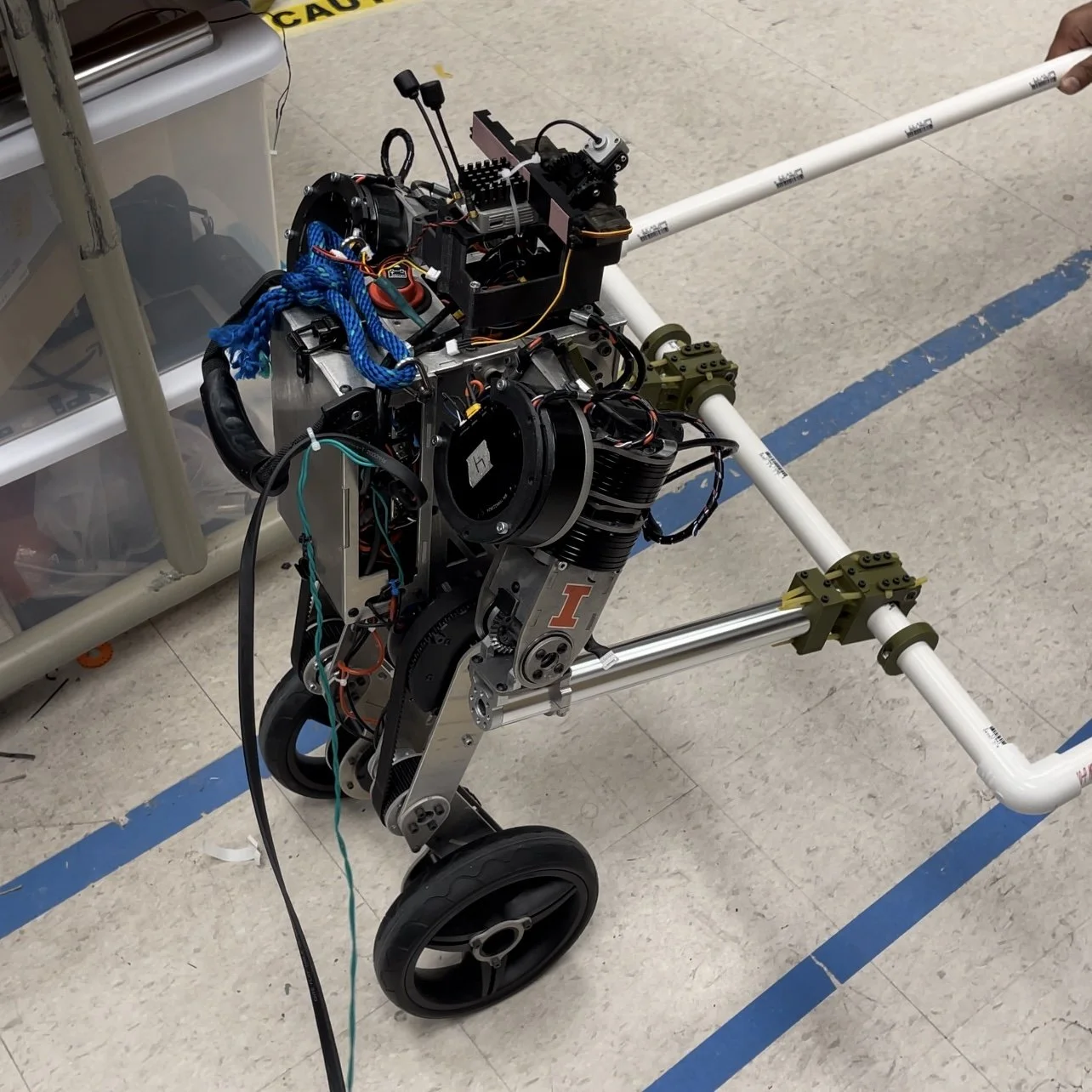
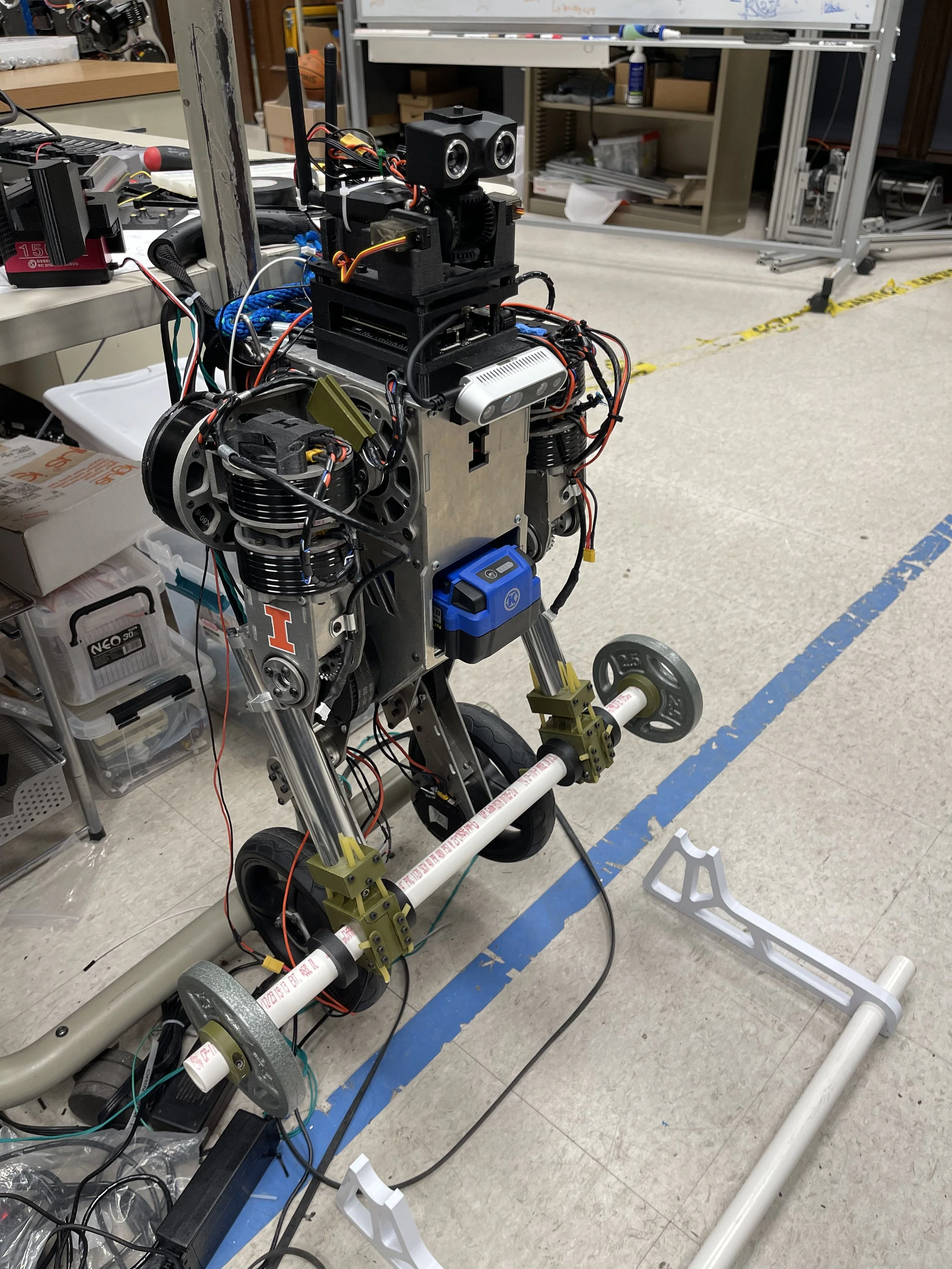
Passive Grippers
This passive gripper was a solo design project assigned to me in Fall 2023. It was developed for snatch and clean experiment. It can self latch onto the bar and self unlatch by pushing the two grippers towards each other to press the release button. The latex surgical tubes are used as spring to zero the grippers. It was first used in the human-robot collaboration experiments and contributed to conference paper published at IEEE Humanoid 2024.

Head Tracking Unit
This head tracking unit takes orientation data from an IMU mounted onto the VR goggle that teleoperator wears to rotate the camera to the direction that teleoperator looks at. My contribution of this project is the mechanical design of IMU mount on the VR module and the structure that holds the camera, servo, the differential bevel gears, and the NVIDIA Jetson Orin Nano Developer Kit. This system had significant improvement over the previous design in reliability and versatility due to the modular design with the emphasis on cooling a high safety factor.
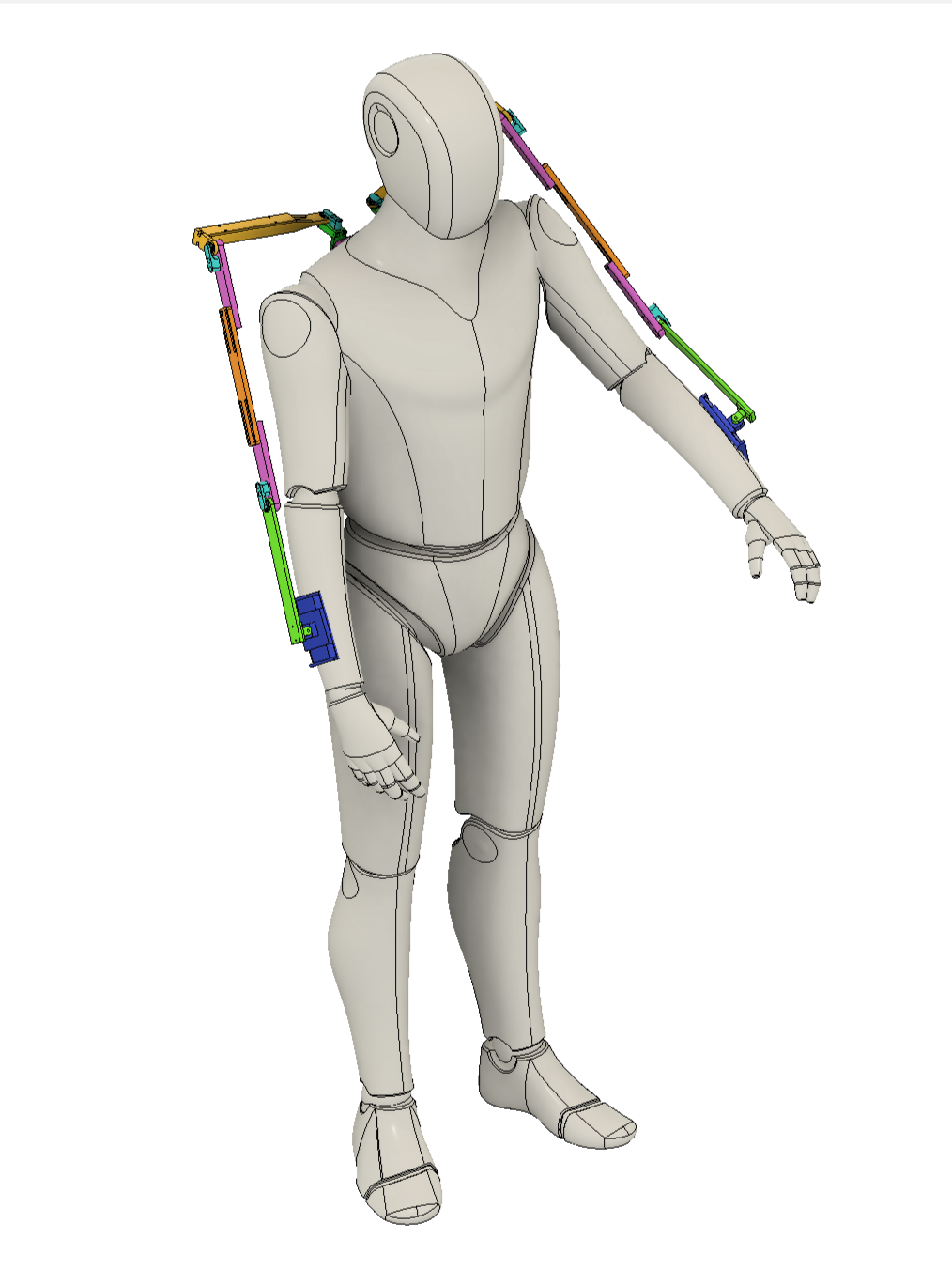
Mobile Human Robot Interface
This is a prototype of a compact mobile human robot interface that allows teleoperator to control the robot with less space constraint. My main contribution on this project is the mechanical design of the whole system. This is an on-going project that aims to improve flexibility and capturability of the teleoperator’s arm motion, which will be essential for accomplishing the snatch and clean motion that we have been aiming for. Moreover, the human robot interface can be carried with the robot to the location the robot is deployed to allow easier control and more cost effective operation of the robot.